

|
新聞主題 |
發電機組準同期并列裝置的構成和原理 |
摘要:同期裝置的任務是實現自動并列操作,應具有自動檢測待并發電機與母線之間的壓差及頻差是否符合并列條件,并在滿足這兩個條件時,能自動地發出合閘脈沖,使并列斷路器主觸頭在相角差為零的瞬間閉合;當壓差、頻差不滿足并列條件時,能對待并發電機自動地進行調壓、調速,以加快進行自動并列的過程。在滿足并列條件的情況下,采用準同期并列方法將待并發電機組投入電網運行,只要控制得當就可使沖擊電流很小且對電網擾動甚微。因此準同期并列是電力系統運行中的主要并列方式。
一、準同期并列的控制邏輯分區
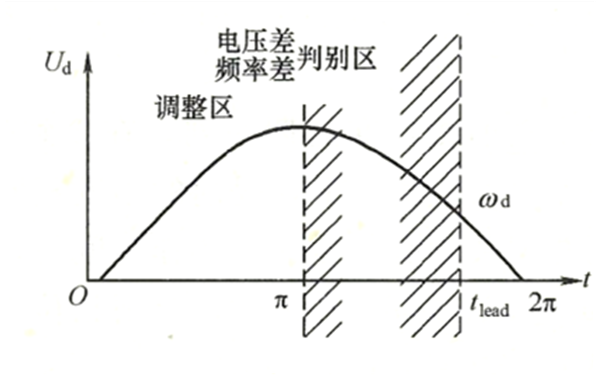
待并斷路器兩側在合閘前為脈動電壓,脈動電壓的一個周期從控制邏輯上共分三個區域。
1、電壓差、頻率差調整區
δ在0~π區間,當電壓差或頻率差高于允許值時,進行差值方向判別,并進行電壓或頻率的調整,見圖1。
2、電壓差、頻率差判別區
δ在π~2π之前的區間,對電壓差和頻率差是否低于允許值進行檢測,若兩差值均低于允許值,則邏輯允許開放合閘脈沖作用,若任一差值高于允許值,則對合閘脈沖進行閉鎖,見圖1。
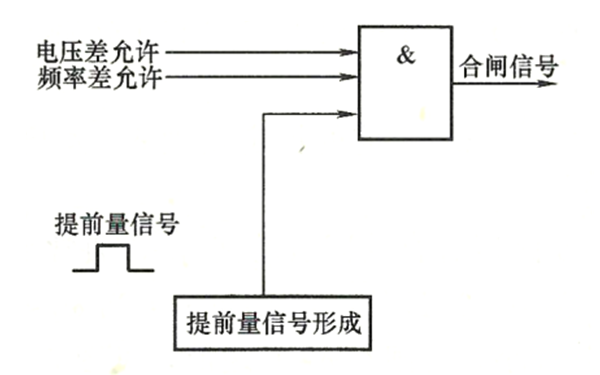
3、合閘區
在脈動電壓δ到達2π前產生合閘脈沖,若邏輯允許合閘,則向斷路器合閘回路發出合閘脈沖。若邏輯不允許合閘,則合閘脈沖將被閉鎖,斷路器不會合閘,見圖2。
|
圖1 準同期并聯合閘控制時間配合曲線圖 |
圖2 準同期并聯合閘信號控制邏輯圖 |
二、自動準同期并列裝置構成
1、自動準同期裝置構成及功能
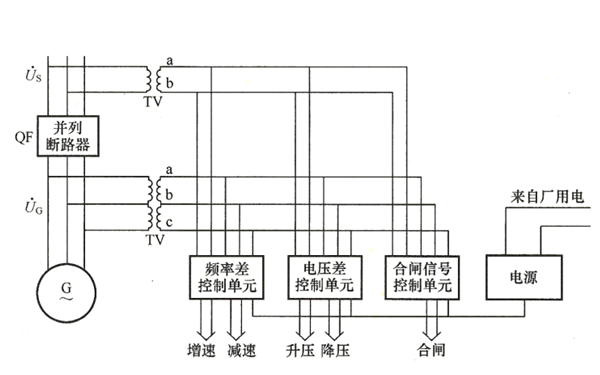
圖3所示為典型自動準同期并列裝置構成原理圖,由圖可見,自動準同步裝置主要由頻率差控制單元、電壓差控制單元、合閘信號控制單元和電源部分組成。其中頻率差控制單元的任務是自動檢測Ug與Us間的滑差角頻率,且自動調節發電機轉速,使發電機的頻率接近于系統頻率。各控制部分作用分述如下:
(1)頻率差控制單元:檢測Ug與Us間的滑差角速度ωd,若ωG<ωS,發電機轉速過低,則發出增速脈沖;若ωG>ωS,發電機轉速過高,則發出減速脈沖,調節轉速,使發電機電壓的頻率接近于系統頻率。
(2)電壓控制單元:檢測Ug與Us間的電壓差,若UG<US,發電機電壓過低,則發出增加勵磁信號;若UG>US,發電機電壓過高,則發出減少勵磁信號,調節電壓UG使它與US的差值小于允許值。
(3)合閘信號控制單元:選擇合適的時機,即在相角差δ等于零(2π)的時刻之前,提前一個量發出合閘信號。若頻率和電壓都滿足并列條件,則合閘信號回路開放,控制斷路器合閘。
|
圖3 自動準同期并列裝置構成原理圖 |
2、自動準同期并列合閘信號
在準同期并列控制中,斷路器的合閘信號并不是在δ等于零(2π)時發出的,原因是控制單元發出合閘信號后,該信號需要放大,以能夠驅動斷路器的操動機構,信號會有延遲,而斷路器的操動機構在收到合閘信號后,機械操動機構動作使斷路器動靜觸頭閉合同樣會有時間延遲,即斷路器存在固有的合閘時間。
在準同期并列操作中,合閘信號控制單元是準同步并列裝置的核心部件,其控制原則是當頻率和電壓都滿足并列條件的情況下,在Ug與Us重合之前發出合閘信號。以達到在Ug與Us兩相量重合(δ=2π)時斷路器動靜觸頭正好閉合。兩電壓相量重合之前的信號稱為提前量信號。按提前量的不同,準同步并列裝置可分為恒定越前相角和恒定越前時間兩種原理。
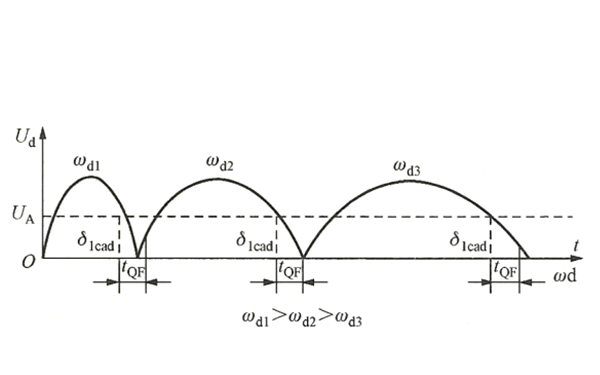
(1)恒定越前相角準同期并列。在δ到達0(2π)之前的恒定角度δlead發出合閘信號。不同的頻率差(ωd)情況下,提前的角度相同。
準同期并列裝置有信號輸出動作時間tc,斷路器有合閘固有時間tQF,通常令tlead=tc+tQF。若取ωd2=ωd.set=δlead/tlead時,合閘相位差為0,稱最佳滑差角頻率。當ωd不等于ωd.set時,ωd1較大,經tQF時間合閘在δ=0之后;ωd3較小,合閘在δ=0之前,見圖4。一般情況下合閘時均有相位差存在,即會產生一定的沖擊電流。
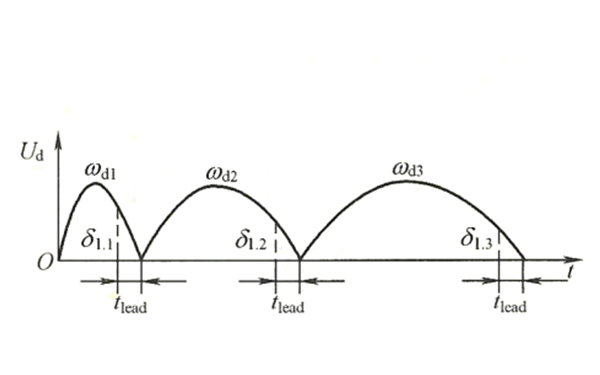
(2)恒定越前時間準同期并列。在δ到達0(2π)之前恒定時間tlead發出合閘信號,不同的頻率差(ωd)情況下,提前的角度是變化的(δ1.1>δ1.2>δ1.3)。取tlead與合閘回路固有時間tc十tQF相同,見圖5。理論上,合閘時正好δ=0,無沖擊電流,因此恒定越前時間準同期并列為目前廣泛應用的方法。
由圖5可得
tlead=tc+tQF................................................. (5-16)
式中,tc ——自動準同期裝置的動作時間;
tQF——并列斷路器的合閘時間;
tlead——恒定越前時間,對應的δlead=ωdtlesd隨ωd變化,成正比關系。
|
圖4 恒定越前相角準同期并列曲線圖 |
圖5 恒定越前時間準同期并列曲線圖 |
3、恒定越前時間的并列控制過程
在恒定越前時間到達前完成電壓差檢測、頻率差檢測,通過計算機計算電壓差ΔU=UG-US,計算Δf=fG-fS,判別是否滿足合閘條件。若滿足,開放合閘脈沖;若不滿足,閉鎖合閘脈沖,根據ΔU、Δf的正負可判別電壓及頻率調整方向,并發出相應調整信號。
合閘信號控制單元在每個脈動周期中,在δ到達2π前,即恒定越前時間到達時,產生一個合閘脈沖信號,但該合閘信號是否起作用,取決于通道是否處于開放狀態,即并列電壓、頻率條件滿足,則通道未被閉鎖,將驅動斷路器合閘,經tlead時間,斷路器動靜觸頭閉合,發電機并入電網;若并列電壓、頻率條件不滿足,則通道被閉鎖,進入下一脈動周期,進行調整。
三、準同期并列條件計算
1、允許電壓差
發電機采用自動準同期并列方式與系統進行并列,系統的參數已歸算到以發電機額定容量的標幺值。設一次系統的參數為:發電機次暫態電抗X”d為0.105;系統與線路等值電抗為0.05;待并發電機允許的沖擊電流值。
由式(5-10)計算允許電壓差得
![]()
2、允許滑差角頻率
設合閘控制回路和斷路器操動機均存在誤差,由此造成合閘誤差角δ。
設δset為發電機組的允許合閘相角,則最大允許滑差ωd.set為

式中,Δtc——自動并列裝置動作時間誤差;
ΔtQF——斷路器合閘時間誤差。
其中允許合閘相角δset取決于發電機的允許沖擊電流值i”imp.m。
設一次系統的參數為:發電機交軸次暫態電抗X”q為0.115;系統等值機組的交軸次暫態電抗與線路電抗為0.08;斷路器合閘時間tQF=0.05s,它的最大可能誤差時間為±20%;自動并列裝置最大誤差時間為士0.02s;待并發電機允許的沖擊電流值為
![]()
由式(5-12)計算允許合閘誤差角δset為

式中考慮并列時發電機電動勢超過額定電壓5%,E”q取1.05。
由式(5-18)計算允許滑差ωd.set為
![]()
由式(5-6)計算允許滑差ωd.set對應的脈動電壓周期Td為
![]()
總結:
----------------
以上信息來源于互聯網行業新聞,特此聲明!
若有違反相關法律或者侵犯版權,請通知我們!
溫馨提示:未經我方許可,請勿隨意轉載信息!
如果希望了解更多有關柴油發電機組技術數據與產品資料,請電話聯系銷售宣傳部門或訪問我們官網:http://www.dhgif.com
- 上一篇:柴油發電機啟動電瓶電壓正常范圍
- 下一篇:柴油發電機組的自動控制怎樣使用




