

|
性能特點和作用說明 |
發(fā)電機組并列準(zhǔn)同期裝置的特點和逆功率調(diào)整 |
摘要∶我國是世界上微機準(zhǔn)同期裝置最早研制的國家之一,同期裝置能自動地調(diào)整頻率,至于電壓調(diào)整,有些裝置能自動地進行,也有一些裝置沒有電壓自動調(diào)節(jié)功能,需要靠發(fā)電機的自動調(diào)節(jié)勵磁裝置或由運行人員手動進行調(diào)整。當(dāng)同期條件滿足后,同期裝置能選擇合適的時機自動地發(fā)出合閘脈沖。康明斯公司在本文簡要介紹同步發(fā)電機的自動準(zhǔn)同期并列基本原理,并說明了同期并列的基本基本條件,以及微機型自動準(zhǔn)同期裝置的功能和發(fā)展歷程等內(nèi)容。
一、準(zhǔn)同期裝置的發(fā)展
電力系統(tǒng)中的同期并列方式主要有自同期并列和準(zhǔn)同期并列兩種,其中自同期并列主要用于發(fā)電機組,作為處理系統(tǒng)事故的重要措施之一。但是由于自同期的使用不可避免地會出現(xiàn)較大的沖擊電流并伴隨母線電的下降,因此所使用的場合不多,相反應(yīng)用最廣泛的是準(zhǔn)同期并列。
(1)第一代準(zhǔn)同期裝置
在二十世紀六十年代以前,我國大多采用“旋轉(zhuǎn)燈光法”進行準(zhǔn)同期并列操作。這是最原始的準(zhǔn)同期方法。后來改用指針式電磁繞組的整步表構(gòu)成的手動準(zhǔn)同期裝置。這種方法仍然應(yīng)用在常規(guī)的設(shè)計中。
(2)第二代準(zhǔn)同期裝置
以zz03和ZZQS為代表的模擬式自動準(zhǔn)同期裝置。它用分立晶體管元件搭建硬件電路,對同期條件進行檢測和處理。ZZQ 3和ZZQS自動準(zhǔn)同期裝置的出現(xiàn),極大的提高了并網(wǎng)速度和可靠性,但由于模擬式同期裝置用模擬電子元件擬合,必然帶來諸如導(dǎo)前時間不穩(wěn)定、阻容電路作為微分電路的條件約束、構(gòu)成裝置元器件參數(shù)漂移不穩(wěn)定等問題。模擬式的同期裝置合閘準(zhǔn)確度比較低,它無法指示裝置的運行狀態(tài),不能進行故障自檢等,現(xiàn)在已經(jīng)基本被淘汰。
(3)第三代準(zhǔn)同期裝置
采用微機式自動準(zhǔn)同期裝置,微處理器的誕生對自動準(zhǔn)同期裝置技術(shù)指標(biāo)的提升產(chǎn)生了質(zhì)的飛躍,深圳市智能設(shè)備開發(fā)有限公司研制的SID·2系列多功能微機自動準(zhǔn)同期裝置比較具有代表性。它是我國最早從事微機準(zhǔn)同期控制器研究、開發(fā)、生產(chǎn)的企業(yè)之一,相繼推出了QSA型、SID.1型、SID.2型、SID-2V系列發(fā)電機用微機準(zhǔn)同期控制器及SID.2T系列線路用微機準(zhǔn)同期控制器,具有高精度、高可靠性、人機界面友好、操作方便、接線簡單等特點。在提高并網(wǎng)速度和可靠性的同時,大大提高了合閘準(zhǔn)確度。
二、微機準(zhǔn)同期裝置的特點
1、頻差、相角差鑒別電路
頻差、相角差鑒別電路用以從外界輸入裝置的兩側(cè)電壓互感器二次電壓中提取與頻率和相角差有關(guān)的量,進而實現(xiàn)對準(zhǔn)同期三要素中頻差及相角差的檢查,以確定是否符合同期條件。來自并列點斷路器兩側(cè)TVs及TVG的二次電壓經(jīng)過隔離電路后通過相敏電路將正弦波轉(zhuǎn)化為相同頻率的矩形波,通過對矩形波電壓的過零檢測,即可得出待并發(fā)電機側(cè)及運行系統(tǒng)側(cè)的頻率fs、 fc的信息,進而就不難獲得頻差fD、角頻率差WD。
2、壓差鑒別電路
壓差鑒別電路用以從外部輸入裝置的TVs及TVG兩電壓互感器二次側(cè)電壓中提取電壓有效值,進而實現(xiàn)對準(zhǔn)同期三要素中壓差的檢查,以確定是否符合同期條件。如不符合同期條件,則根據(jù)壓差的大小和極性進行均壓控制。
3、輸入電路
自動準(zhǔn)同期裝置的輸入信號除并列點兩側(cè)的TV二次電壓外還要輸入如下開關(guān)量信號∶
① 并列點選擇信號。
自動準(zhǔn)同期裝置不論是單機型還是多機型,其參數(shù)存儲器中都要預(yù)先存放好各臺發(fā)電機的同期參數(shù)整定值,例如導(dǎo)前時間、允許頻差、允許壓差、均頻控制系數(shù)、均壓控制系數(shù)等。在確定即將執(zhí)行并網(wǎng)的并列點后,首先要通過控制臺上每個并列點的同期開關(guān)(或由上位機控制的相應(yīng)繼電器)從同期裝置的并列點選擇輸入端送入一個開關(guān)量信號,這樣同期裝置接入后(或復(fù)位后)即會調(diào)出相應(yīng)的整定值,進行并網(wǎng)條件檢測。裝置可供多臺發(fā)電機并網(wǎng)共用,但每次只能為一臺發(fā)電機服務(wù)。如同時給同期裝置的并列點選擇輸入端送上一個以上的開關(guān)量信號時,裝置將會給出并列點大于或等于2的出錯信息。
② 斷路器輔助節(jié)點信號。
并列點斷路器輔助節(jié)點是用米實時測量斷路器合閘時間(含中間繼電器動作時間)的。同期裝置的導(dǎo)前時間整定值越是接近斷路器的實際合閘時間,并網(wǎng)時的相角差就越小。這也是為什么要實測斷路器合閘時間的理由。在同期裝置發(fā)出合閘命令的同時,即啟動內(nèi)部的一個毫秒計時器,直到裝置回收到斷路器輔助節(jié)點的變位信號后停止計時,這個計時值即為斷路器合閘時間。應(yīng)該指出斷路器主觸頭的動作不一定和輔助節(jié)點同步,因此這種測量合閘時間的方法是存在誤差的。彌補的方法是由錄波器在并網(wǎng)時通過記錄脈振電壓及同期裝置合閘繼電器節(jié)點動作的波形圖,得到斷路器精確合閘時間,與由輔助節(jié)點測出的合閘時間的差值在軟件上進行修正。也可通過同期瞬間并列點兩側(cè)電壓的突變這一信息精確計算出斷路器合閘時間。
③ 遠方復(fù)位信號。
“復(fù)位”是使微機從頭再執(zhí)行程序的一項操作,同期裝置在自檢或工作過程中如果出現(xiàn)硬件、軟件問題或受干擾都可能導(dǎo)致出錯或死機。此時可通過按一下裝置面板上的復(fù)位按鈕或設(shè)在控制臺上的遠方復(fù)位按鈕使裝置復(fù)位,復(fù)位后裝置可能又正常工作了,也可能仍舊顯示出錯或死機。前者說明是裝置受短暫的千擾,而本身無故障,后者則是裝置有故障應(yīng)檢查。④面板的按鍵。同期裝置面板上裝有若千按鍵,這些按鍵也是開關(guān)量形式的輸入量,與前述輸入開關(guān)量不同的不是由裝置對外的插座輸入,而是由裝置面板直接輸入到并行輸入接口電路。
4、輸出電路
微機型自動準(zhǔn)同期裝置輸出電路分為四類,第一類是控制類,實現(xiàn)同期裝置對發(fā)電機組的均壓、均頻和合閘控制。第二類是信號類,裝置異常或電源消失報替。第三類是錄波類,對外提供反應(yīng)同期過程的電量進行錄波。第四類是顯示類,供使用人員監(jiān)視裝置工況,實時參數(shù),整定值及異常情況等提示信息。控制命令由加速、減速、升壓、降壓、合閘、同期閉鎖等繼電器執(zhí)行。裝置異常及失電信號也是由繼電器發(fā)出,同期裝置的任何軟件和硬件故障都將啟動報警繼電器動作,觸發(fā)中央音響信號,具體故障類別同時在同期裝置的顯示器上顯示。
5、基本功能
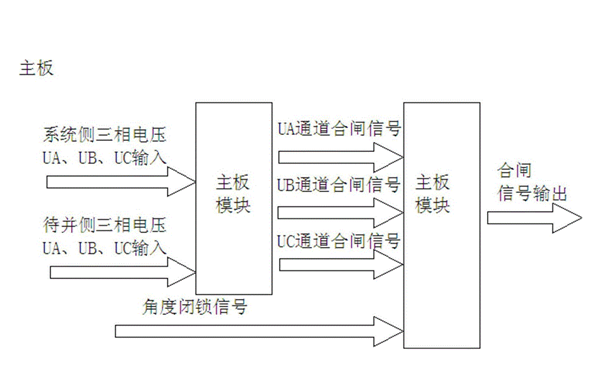
微機型自動準(zhǔn)同期裝置如圖1所示,工作流程如圖2所示。
(1)能適應(yīng)TV的不同相別和電壓值;
(2)應(yīng)有良好的均頻與均壓控制品質(zhì);
(3)應(yīng)確保在相角差為零度時并網(wǎng);
(4)應(yīng)不失時機的捕獲第一次出現(xiàn)的同期時機;
(5)應(yīng)具備低壓和高壓閉鎖功能
(6)應(yīng)能及時消除同步過程中的同頻狀態(tài);
(7)應(yīng)具備接入發(fā)電廠分布式控制系統(tǒng)(DCS)和變電所微機監(jiān)控系統(tǒng)(SN CS)的通信功能;
(8)應(yīng)能自動在線測量并列點斷路器合閘回路動作時間;
(9)應(yīng)賦予更多便于設(shè)計和使用的功能例如∶
① 自動轉(zhuǎn)角功能;
② 復(fù)合同期表功能∶
③ 調(diào)試校驗功能∶
④ 提供錄波的相關(guān)電量。
|
圖1 發(fā)電機組雙微機自動準(zhǔn)同期控制柜 |
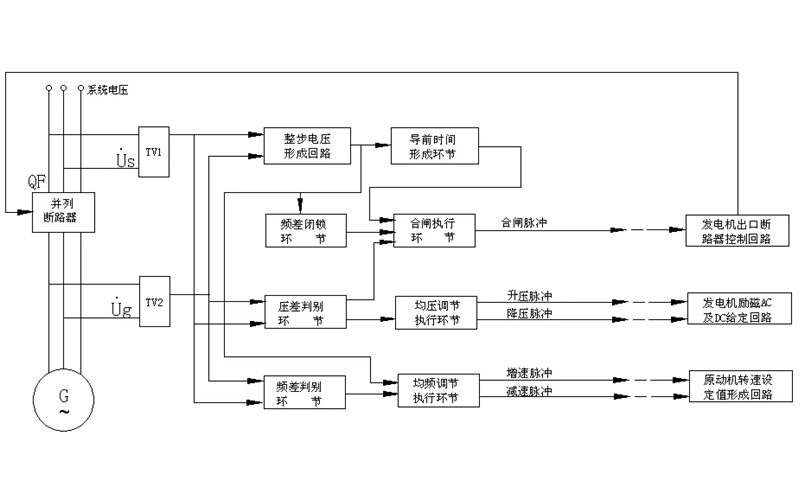
圖2 微機自動準(zhǔn)同期裝置工作流程圖 |

三、同期參數(shù)的測量
1、交流電壓有效值的測量
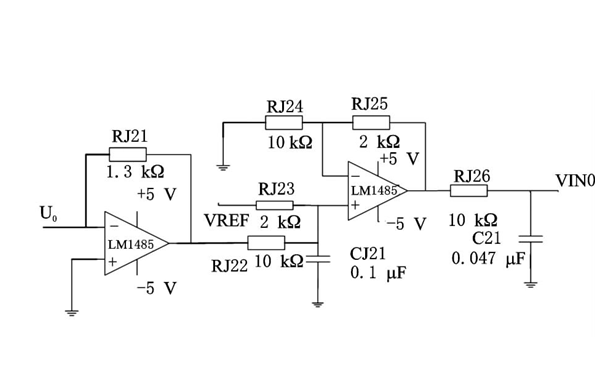
交流電壓有效值的測量有兩種方法∶一種最簡化的辦法是采用變送器把交流電壓轉(zhuǎn)化為直流電壓(其有效值),然后由A/D接口電路進入主機;另一種是對交流電壓接采樣,然后通過計算求得其有效值。準(zhǔn)同期裝置數(shù)據(jù)采集電路如圖3所示。
(1)直流采樣
直流采樣采用電量變送器把交流電壓轉(zhuǎn)化為直流電壓(其有效值),然后經(jīng)A/D接口電路進入主機,主機讀出的數(shù)值直接反映了所測變量之值。這種方法容易實現(xiàn),也可保證足夠精度,但無法實現(xiàn)實時數(shù)據(jù)信號的采集。
(2)交流采樣
對于一個周期信號f(t)=f(t+T),在滿足一定條件下可以展開為富氏級數(shù)。
2、頻率的測量
頻率是電力系統(tǒng)的重要參數(shù)。電力系統(tǒng)的頻率一方面是自動準(zhǔn)同期裝置以頻率或頻差作為合閘判據(jù),另一方面在對交流電壓信號進行同步采樣時,需要實時跟蹤電力系統(tǒng)的頻率。目前,頻率測量的方法主要有兩種∶以硬件電路為主的硬件測量法和基于交流采樣值處理的軟件測量法。
(1)頻率的硬件側(cè)量方法
首先用前置低通濾波器濾除電壓信號中的諧波分量,以避免測量結(jié)果受諧波的影響。電壓比較器將正弦波信號變換成同頻率的方波信號,在方波信號的兩個相鄰下降沿,CPU通過內(nèi)部的計數(shù)器來求取電壓信號周期,以此得到系統(tǒng)的頻率值。硬件測量法的實現(xiàn)電路簡單,響應(yīng)快,計算機計算量小。然而,它存在一些缺陷∶
① 諧波分量會給測量造成影響;
② 需占用微處理器外部定時器/計數(shù)器,而大多數(shù)微處理器(如單片機)的外部定時器/計數(shù)器是很少的。
盡管如此,在電力系統(tǒng)的應(yīng)用中,大多專門設(shè)置了測頻電路,并采用硬件測頻方法測量頻率。
(2)頻率的軟件測量方法
軟件測頻方法不需要專用的硬件測頻電路,通過對交流采樣值的分析和計算,采用一定的算法來求取系統(tǒng)頻率。軟件測頻方法有很多,歸納起來有以下幾種∶
① 周期法
原始的周期法(或稱零交法)通過測量信號波形相繼過零點的時間寬度來計算頻率,其原理與硬件測頻法相同。該方法物理概念清晰、易于實現(xiàn),但精度低,受諧波、噪聲和非周期分量的影響,實時性不好。對它的改進主要是為了提高測量的精度和實時性,典型的改進算法有水平交(levelc rossing)算法、高次修正函數(shù)法和最小二乘多項式曲線擬合法,它們以增加計算量和復(fù)雜度來提高算法的精度和響應(yīng)速度(原始的周期算法的時延決定于信號特征而非計算量),這在一定程度上喪失了原有算法的簡明性。
② 解析法
對信號觀測模型進行數(shù)學(xué)變換,將待測量頻率.f或頻差叮表示為采樣值的函數(shù)來估計。解析法算法簡明,計算量不大,較傳統(tǒng)的周期法有所改進。用解析法測頻時,為簡化分析與計算,一般采用較簡單的信號數(shù)學(xué)模型,難以考慮諧波、非周期分量等的影響,因此往往要有前置濾波環(huán)節(jié)。如上述算法,當(dāng)電網(wǎng)中諧波分量較高時,必須采用適當(dāng)?shù)臄?shù)字濾波對采樣數(shù)據(jù)進行預(yù)處理。
③ DFT類算法
該類算法利用前后數(shù)據(jù)窗的DFT計算結(jié)果求取頻率偏移來估計頻率值。它可通過自適應(yīng)調(diào)整采樣時間間隔或自適應(yīng)調(diào)整采樣數(shù)據(jù)窗長度的方法來提高測量范圍、精度和算法穩(wěn)定性。此外,還有最小二乘算法等多種算法。
3、相角差的測量
把電壓互感器二次側(cè)的交流電壓信號轉(zhuǎn)換為同頻、同相的方波,兩路方波信號接到異或門,當(dāng)兩路方波輸入電平不同時,異或門輸出為高電平,用于控制可編程定時計數(shù)器的計數(shù)時間,其計數(shù)值與兩波形間的相角差氏相對應(yīng)圖,如圖4所示,是系統(tǒng)電壓與發(fā)電機電壓相角差的硬件測量電路示意圖。相角差硬件測量的原理和特點與頻率的硬件測量很相似。
|
圖3 發(fā)電機組準(zhǔn)同期裝置數(shù)據(jù)采集電路圖 |
圖4 發(fā)電機組自動準(zhǔn)同期并網(wǎng)實驗圖 |
五、調(diào)整逆功現(xiàn)象的調(diào)整
當(dāng)兩臺發(fā)電機組空載并列后,會在兩臺發(fā)電機組之間,產(chǎn)生一個頻率差與電壓差的問題。并且在兩臺發(fā)電機組的監(jiān)視儀表上(電流表、功率表、功率因數(shù)表),反應(yīng)出實際的逆功情況,一種是轉(zhuǎn)速(頻率)不一致造成的逆功,另一種是電壓不等造成的逆功,其調(diào)整如下:
1、頻率造成逆功現(xiàn)象的調(diào)整:
如果兩臺發(fā)電機組的頻率不等,相差較大時,在儀表上(電流表、功率表)顯示出,轉(zhuǎn)速高的發(fā)電機組電流顯示正值,功率表指示為正功 率,反之,電流指示負值,功率指示負值。這時調(diào)整其中一臺發(fā)電機組的轉(zhuǎn)速(頻率),視功率表的指示進行調(diào)整,把功率表的指示調(diào)整為零即可。使兩臺發(fā)電機組的功率指 示均為零,這樣兩臺機的轉(zhuǎn)速(頻率)基本上一致。但是,這時電流表仍有指示時,這就是電壓差造成的逆功現(xiàn)象了。
2、電壓差造成逆功現(xiàn)象的調(diào)整:
當(dāng)兩臺發(fā)電機組的功率表指示均為零時,而電流表仍然有電流指示(即一反一正指示)時,可調(diào)整其中一臺發(fā)電機組的電壓調(diào)整旋 鈕,調(diào)整時,視電流表與功率因數(shù)的指示進行。將電流表的指示消除(即調(diào)整為零),電流表無指示后,這時視功率因數(shù)表的指示,把功率因數(shù)調(diào)至滯后0.5以上 即可.一般可調(diào)整至0.8左右,為最佳狀態(tài)。
總結(jié):
將同步發(fā)電機投入電力系統(tǒng)并列運行的操作稱為并列操作,并列操作是電力系統(tǒng)運行中的一項重要操作,是發(fā)電機機組開機運行中的關(guān)鍵工序。發(fā)電機同期裝置是發(fā)電廠二次系統(tǒng)的重要組成部分,它實現(xiàn)發(fā)電機與電網(wǎng)系統(tǒng)的并列運行,并網(wǎng)的條件是發(fā)電機與系統(tǒng)的相序、頻率、電壓都要相同時即所謂同期時才能并網(wǎng),將發(fā)電機機組安全、可靠、準(zhǔn)確快速的投入,從而保證系統(tǒng)的可靠,經(jīng)濟運行和發(fā)電機組的安全。
本文以微機同期裝置的調(diào)試及并網(wǎng)情況。該裝置不僅可以用于發(fā)電機與電網(wǎng)之間的差頻并網(wǎng),同時也可用于線路的差頻和同頻并網(wǎng),具有自動識別并列點并網(wǎng)性質(zhì)的功能。當(dāng)裝置自動識別出當(dāng)前并網(wǎng)性質(zhì)時,精確的控制數(shù)學(xué)模型能快速的捕捉到第一個快速并網(wǎng)的時機,當(dāng)發(fā)電機與系統(tǒng)的角差為零時可靠的完成無沖擊并網(wǎng)。在發(fā)電機并網(wǎng)過程中,按照模糊控制理論算法,對發(fā)電機的頻率和電壓進行快速調(diào)節(jié),確保頻差和壓差又快又平穩(wěn)的達到整定范圍,從而實現(xiàn)快速并網(wǎng)。
----------------
以上信息來源于互聯(lián)網(wǎng)行業(yè)新聞,特此聲明!
若有違反相關(guān)法律或者侵犯版權(quán),請通知我們!
溫馨提示:未經(jīng)我方許可,請勿隨意轉(zhuǎn)載信息!
如果希望了解更多有關(guān)柴油發(fā)電機組技術(shù)數(shù)據(jù)與產(chǎn)品資料,請電話聯(lián)系銷售宣傳部門或訪問我們官網(wǎng):http://www.dhgif.com




